Go Map 扩容机制深度解析
扩容机制概述
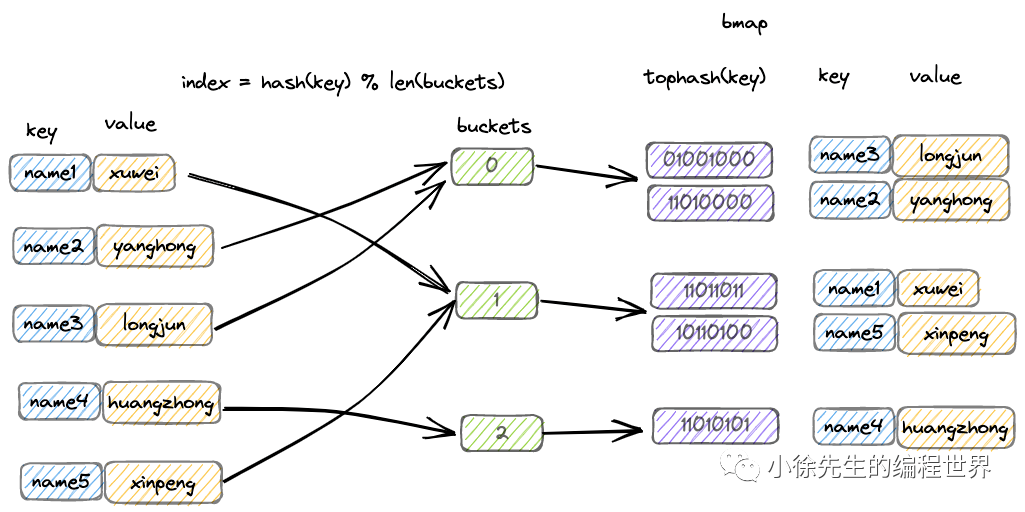
Go map 的扩容机制是其高性能的关键保障。通过动态调整桶数组大小,map 能够在元素数量增长时始终保持 O(1) 的平均访问时间复杂度。
扩容类型详解
map 的扩容类型分为两类:增量扩容和等量扩容。
增量扩容(翻倍扩容)
表现 :扩容后,桶数组的长度增长为原长度的 2 倍
目的 :降低每个桶中 key-value 对的数量,优化 map 操作的时间复杂度
触发条件 :当负载因子超过 6.5 时
1 负载因子 = 元素总数 / 桶数组长度 > 6.5
等量扩容(整理扩容)
表现 :扩容后,桶数组的长度和之前保持一致;但是溢出桶的数量会下降
目的 :提高桶主体结构的数据填充率,减少溢出桶数量,避免发生内存泄漏
触发条件 :当溢出桶数量过多时
扩容触发条件
触发时机
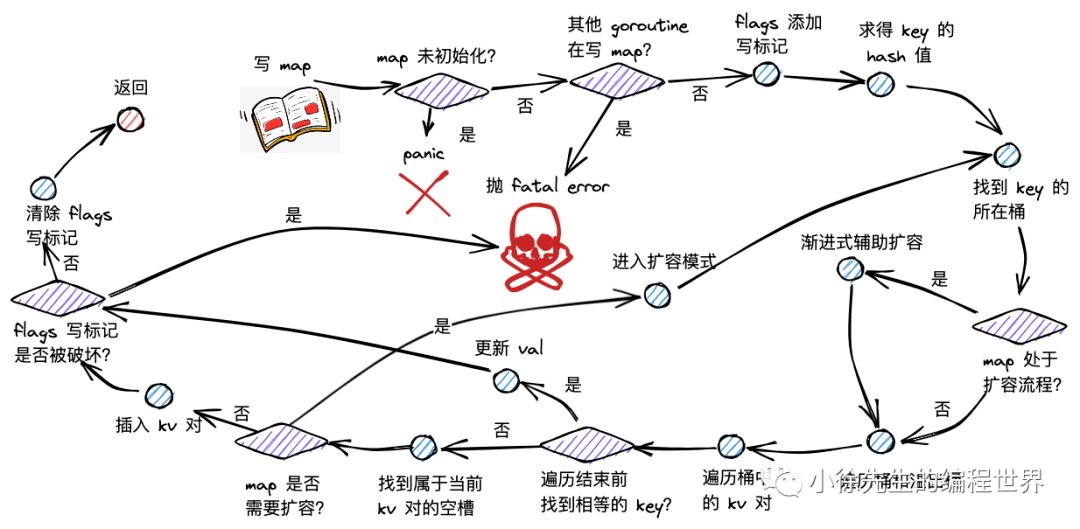
只有 map 的写流程可能开启扩容模式。写 map 新插入 key-value 对之前,会发起扩容条件判断:
1 2 3 4 5 6 7 8 func mapassign (t *maptype, h *hmap, key unsafe.Pointer) if !h.growing() && (overLoadFactor(h.count+1 , h.B) || tooManyOverflowBuckets(h.noverflow, h.B)) { hashGrow(t, h) goto again } }
扩容状态判断
根据 hmap 的 oldbuckets 是否为空,可以判断 map 此前是否已开启扩容模式:
1 2 3 func (h *hmap) bool { return h.oldbuckets != nil }
增量扩容条件
1 2 3 4 5 6 7 8 9 const ( loadFactorNum = 13 loadFactorDen = 2 bucketCnt = 8 ) func overLoadFactor (count int , B uint8 ) bool { return count > bucketCnt && uintptr (count) > loadFactorNum*(bucketShift(B)/loadFactorDen) }
条件:
map 中 key-value 对的数量超过 8 个
负载因子大于 6.5(13/2 = 6.5)
等量扩容条件
1 2 3 4 5 6 func tooManyOverflowBuckets (noverflow uint16 , B uint8 ) bool { if B > 15 { B = 15 } return noverflow >= uint16 (1 )<<(B&15 ) }
条件:溢出桶的数量大于等于 2^B 个(B 大于 15 时取 15)
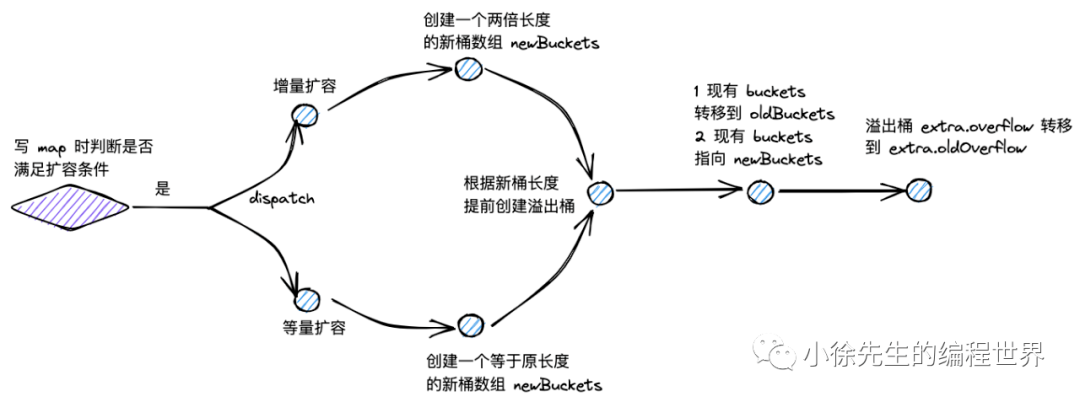
扩容开启流程 - hashGrow
hashGrow 核心实现
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 func hashGrow (t *maptype, h *hmap) bigger := uint8 (1 ) if !overLoadFactor(h.count+1 , h.B) { bigger = 0 h.flags |= sameSizeGrow } oldbuckets := h.buckets newbuckets, nextOverflow := makeBucketArray(t, h.B+bigger, nil ) flags := h.flags &^ (iterator | oldIterator) if h.flags&iterator != 0 { flags |= oldIterator } h.B += bigger h.flags = flags h.oldbuckets = oldbuckets h.buckets = newbuckets h.nevacuate = 0 h.noverflow = 0 if h.extra != nil && h.extra.overflow != nil { if h.extra.oldoverflow != nil { throw("oldoverflow is not nil" ) } h.extra.oldoverflow = h.extra.overflow h.extra.overflow = nil } if nextOverflow != nil { if h.extra == nil { h.extra = new (mapextra) } h.extra.nextOverflow = nextOverflow } }
开启流程详解
1. 扩容类型判断
1 2 3 4 5 bigger := uint8 (1 ) if !overLoadFactor(h.count+1 , h.B) { bigger = 0 h.flags |= sameSizeGrow }
增量扩容:bigger = 1,新桶数组长度翻倍
等量扩容:bigger = 0,并设置等量扩容标志位
2. 新桶数组创建
1 2 oldbuckets := h.buckets newbuckets, nextOverflow := makeBucketArray(t, h.B+bigger, nil )
保存老桶数组引用
创建新桶数组,长度为 2^(B+bigger)
同时创建新的溢出桶
3. 状态更新
1 2 3 4 5 6 h.B += bigger h.flags = flags h.oldbuckets = oldbuckets h.buckets = newbuckets h.nevacuate = 0 h.noverflow = 0
更新桶数组长度指数
设置新老桶数组指针
重置迁移进度和溢出桶计数
4. 溢出桶处理
1 2 3 4 if h.extra != nil && h.extra.overflow != nil { h.extra.oldoverflow = h.extra.overflow h.extra.overflow = nil }
将原本的溢出桶赋给 oldoverflow,为新桶数组分配新的溢出桶。
数据迁移规则
等量扩容迁移
在等量扩容中:
新桶数组长度与原桶数组相同
key-value 对在新桶数组和老桶数组中的索引号保持一致
主要目的是重新整理数据,减少溢出桶
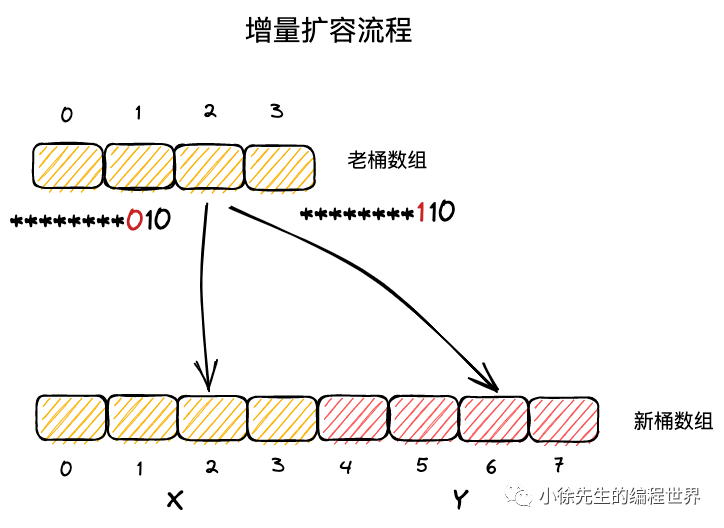
增量扩容迁移
在增量扩容中:
新桶数组长度为原桶数组的 2 倍
把新桶数组分为两个区域:
X 区域 :对应老桶数组的区域(索引 0 到 2^(B-1)-1)Y 区域 :新扩展的区域(索引 2^(B-1) 到 2^B-1)
迁移位置计算
一个 key 属于哪个桶,取决于其 hash 值对桶数组长度取模的结果:
1 bucket = hash & (2 ^B - 1 )
在增量扩容中,key 的新位置只有两种可能:
原位置 i(X 区域)
原位置 + 老桶数组长度(Y 区域)
判断依据是 hash 值的第 B 位:
第 B 位为 0:迁移到 X 区域
第 B 位为 1:迁移到 Y 区域
1 2 3 4 5 6 7 if hash&(1 <<(B-1 )) == 0 { newBucket = oldBucket } else { newBucket = oldBucket + oldBucketCount }
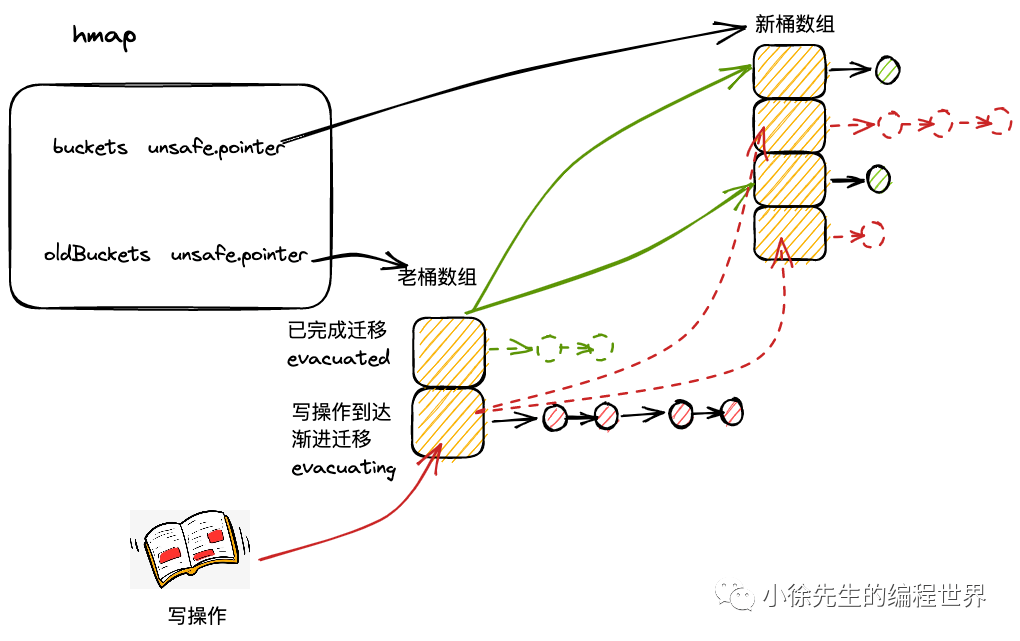
渐进式扩容机制
渐进式扩容策略
map 采用渐进式扩容方式,避免一次性全量迁移导致的性能抖动:
当每次触发写、删操作时,会为处于扩容流程中的 map 完成两组桶的数据迁移:
当前写、删操作所命中的桶
当前未迁移的桶中,索引最小的那个桶
1 2 3 4 5 6 7 8 9 func growWork (t *maptype, h *hmap, bucket uintptr ) evacuate(t, h, bucket&h.oldbucketmask()) if h.growing() { evacuate(t, h, h.nevacuate) } }
渐进式扩容优势
分摊开销 :将扩容开销分摊到多次操作中避免阻塞 :单次操作不会因扩容而长时间阻塞内存友好 :新老数组并存时间较短,减少内存压力用户无感知 :对用户来说扩容过程透明
数据迁移实现 - evacuate
evacuate 核心逻辑
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 func evacuate (t *maptype, h *hmap, oldbucket uintptr ) b := (*bmap)(add(h.oldbuckets, oldbucket*uintptr (t.bucketsize))) newbit := h.noldbuckets() if !evacuated(b) { var xy [2 ]evacDst x := &xy[0 ] x.b = (*bmap)(add(h.buckets, oldbucket*uintptr (t.bucketsize))) x.k = add(unsafe.Pointer(x.b), dataOffset) x.e = add(x.k, bucketCnt*uintptr (t.keysize)) if !h.sameSizeGrow() { y := &xy[1 ] y.b = (*bmap)(add(h.buckets, (oldbucket+newbit)*uintptr (t.bucketsize))) y.k = add(unsafe.Pointer(y.b), dataOffset) y.e = add(y.k, bucketCnt*uintptr (t.keysize)) } for ; b != nil ; b = b.overflow(t) { k := add(unsafe.Pointer(b), dataOffset) e := add(k, bucketCnt*uintptr (t.keysize)) for i := 0 ; i < bucketCnt; i, k, e = i+1 , add(k, uintptr (t.keysize)), add(e, uintptr (t.elemsize)) { top := b.tophash[i] if isEmpty(top) { b.tophash[i] = evacuatedEmpty continue } if top < minTopHash { throw("bad map state" ) } k2 := k if t.indirectkey() { k2 = *((*unsafe.Pointer)(k2)) } var useY uint8 if !h.sameSizeGrow() { hash := t.hasher(k2, uintptr (h.hash0)) if hash&newbit != 0 { useY = 1 } } b.tophash[i] = evacuatedX + useY dst := &xy[useY] if dst.i == bucketCnt { dst.b = h.newoverflow(t, dst.b) dst.i = 0 dst.k = add(unsafe.Pointer(dst.b), dataOffset) dst.e = add(dst.k, bucketCnt*uintptr (t.keysize)) } dst.b.tophash[dst.i&(bucketCnt-1 )] = top if t.indirectkey() { *(*unsafe.Pointer)(dst.k) = k2 } else { typedmemmove(t.key, dst.k, k) } if t.indirectelem() { *(*unsafe.Pointer)(dst.e) = *(*unsafe.Pointer)(e) } else { typedmemmove(t.elem, dst.e, e) } dst.i++ dst.k = add(dst.k, uintptr (t.keysize)) dst.e = add(dst.e, uintptr (t.elemsize)) } } if h.flags&oldIterator == 0 && t.bucket.ptrdata != 0 { bMem := add(h.oldbuckets, oldbucket*uintptr (t.bucketsize)) ptr := add(bMem, dataOffset) n := uintptr (t.bucketsize) - dataOffset memclrHasPointers(ptr, n) } } if oldbucket == h.nevacuate { advanceEvacuationMark(h, t, newbit) } }
迁移过程详解
1. 目标桶准备
1 2 3 var xy [2 ]evacDstx := &xy[0 ] y := &xy[1 ]
2. 迁移位置计算
1 2 3 4 5 6 7 var useY uint8 if !h.sameSizeGrow() { hash := t.hasher(k2, uintptr (h.hash0)) if hash&newbit != 0 { useY = 1 } }
3. 数据复制
根据 key 和 value 是否为指针类型,选择合适的复制方式:
指针类型:直接复制指针
值类型:使用 typedmemmove 复制数据
4. 状态标记
1 b.tophash[i] = evacuatedX + useY
迁移完成后,在老桶中标记该位置已迁移:
evacuatedX:已迁移到 X 区域evacuatedY:已迁移到 Y 区域
迁移进度管理
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 func advanceEvacuationMark (h *hmap, t *maptype, newbit uintptr ) h.nevacuate++ stop := h.nevacuate + 1024 if stop > newbit { stop = newbit } for h.nevacuate != stop && bucketEvacuated(t, h, h.nevacuate) { h.nevacuate++ } if h.nevacuate == newbit { h.oldbuckets = nil if h.extra != nil { h.extra.oldoverflow = nil } h.flags &^= sameSizeGrow } }
扩容期间的操作处理
读操作处理
读操作需要同时检查新老桶数组:
1 2 3 4 5 6 7 8 9 if c := h.oldbuckets; c != nil { if !h.sameSizeGrow() { m >>= 1 } oldb := (*bmap)(add(c, (hash&m)*uintptr (t.bucketsize))) if !evacuated(oldb) { b = oldb } }
写操作处理
写操作会协助扩容进程:
1 2 3 if h.growing() { growWork(t, h, bucket) }
每次写操作都会迁移两个桶,推进扩容进度。
删除操作处理
删除操作同样会协助扩容:
1 2 3 if h.growing() { growWork(t, h, bucket) }
性能分析与优化
扩容开销分析
内存开销 :扩容期间需要同时维护新老两个桶数组时间开销 :每次写操作额外迁移两个桶GC 压力 :迁移过程中可能产生额外的垃圾回收压力
负载因子选择
Go 选择 6.5 作为负载因子的原因:
查找效率 :保证大部分查找在常数时间内完成内存利用率 :避免内存浪费扩容频率 :平衡扩容开销和性能
渐进式扩容优化
批量迁移 :一次迁移整个桶链表内存清理 :及时清理老桶内存状态跟踪 :精确跟踪迁移进度
面试重点问题
Q1: Go map 什么时候会扩容?
A: Go map 有两种扩容触发条件:
增量扩容(容量翻倍):
触发条件:负载因子 > 6.5(count/2^B > 6.5)
扩容后:桶数组长度变为原来的 2 倍
等量扩容(容量不变):
触发条件:溢出桶数量 >= 2^B
目的:整理数据,减少溢出桶数量
Q2: Go map 扩容为什么是渐进式的?
A: 渐进式扩容的优势:
避免阻塞 :一次性迁移所有数据会导致长时间阻塞分摊开销 :将迁移开销分摊到多次操作中用户无感知 :用户操作不会感受到扩容的影响内存友好 :减少内存峰值使用
Q3: 扩容期间如何保证数据一致性?
A: 数据一致性保证机制:
双数组查找 :读操作同时检查新老桶数组协助迁移 :写操作协助推进迁移进度状态标记 :通过 tophash 标记记录迁移状态原子操作 :关键状态更新使用原子操作
Q4: 为什么负载因子选择 6.5?
A: 6.5 负载因子的选择平衡了多个因素:
性能考虑 :保证大部分查找在 O(1) 时间内完成内存效率 :避免过多的内存浪费扩容频率 :控制扩容操作的频率实验结果 :经过大量实验验证的最优值
理解 Go map 的扩容机制对于优化程序性能和避免性能陷阱非常重要。