八股文: Go Map 核心原理与数据结构
Go Map 核心原理与数据结构
核心原理概述
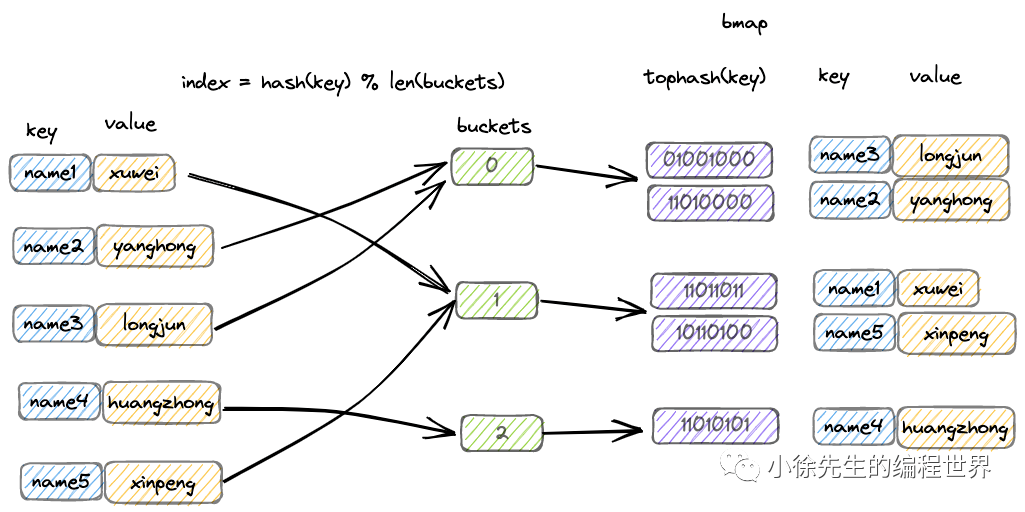
map 又称为 hash map,在算法上基于 hash 实现 key 的映射和寻址;在数据结构上基于桶数组实现 key-value 对的存储。
以一组 key-value 对写入 map 的流程为例进行简述:
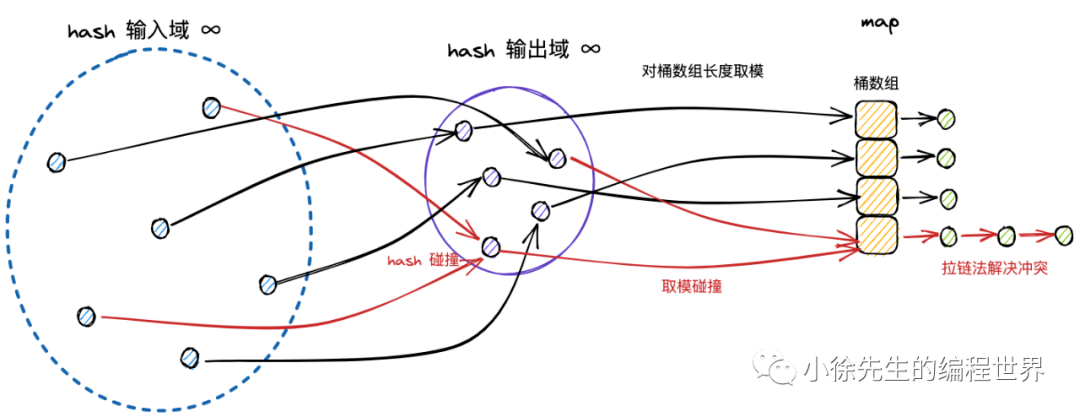
(1)通过哈希方法取得 key 的 hash 值;
(2)hash 值对桶数组长度取模,确定其所属的桶;
(3)在桶中插入 key-value 对。
hash 的性质,保证了相同的 key 必然产生相同的 hash 值,因此能映射到相同的桶中,通过桶内遍历的方式锁定对应的 key-value 对。
因此,只要在宏观流程上,控制每个桶中 key-value 对的数量,就能保证 map 的几项操作都限制为常数级别的时间复杂度。
Hash 原理
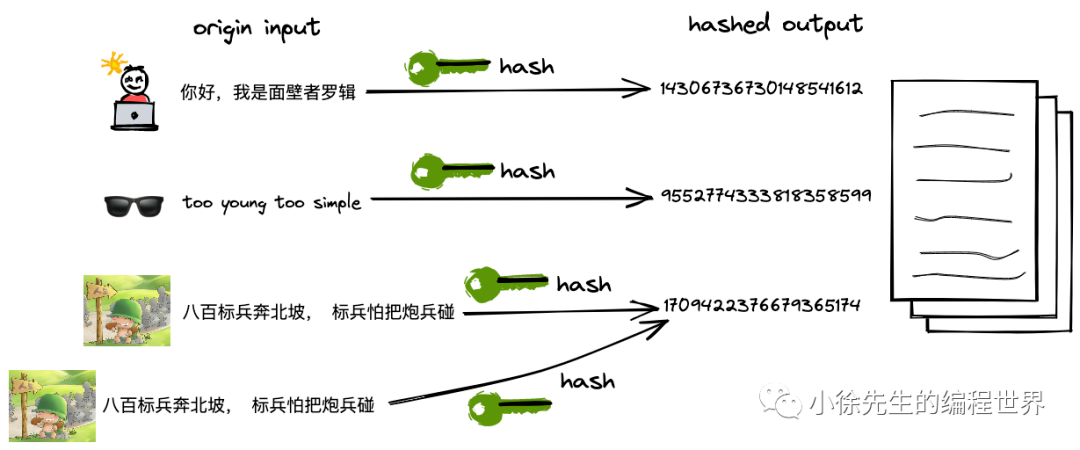
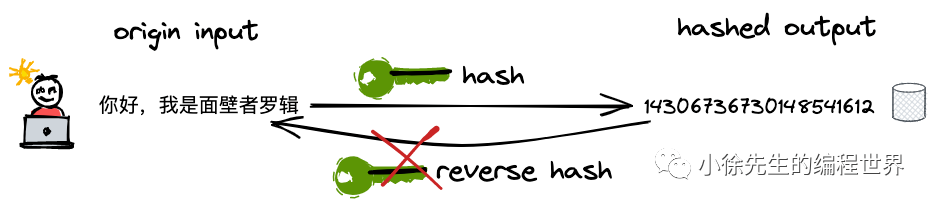
hash 译作散列,是一种将任意长度的输入压缩到某一固定长度的输出摘要的过程,由于这种转换属于压缩映射,输入空间远大于输出空间,因此不同输入可能会映射成相同的输出结果。此外,hash 在压缩过程中会存在部分信息的遗失,因此这种映射关系具有不可逆的特质。
Hash 的核心特性
(1)hash 的可重入性:相同的 key,必然产生相同的 hash 值;
(2)hash 的离散性:只要两个 key 不相同,不论其相似度的高低,产生的 hash 值会在整个输出域内均匀地离散化;
(3)hash 的单向性:企图通过 hash 值反向映射回 key 是无迹可寻的。
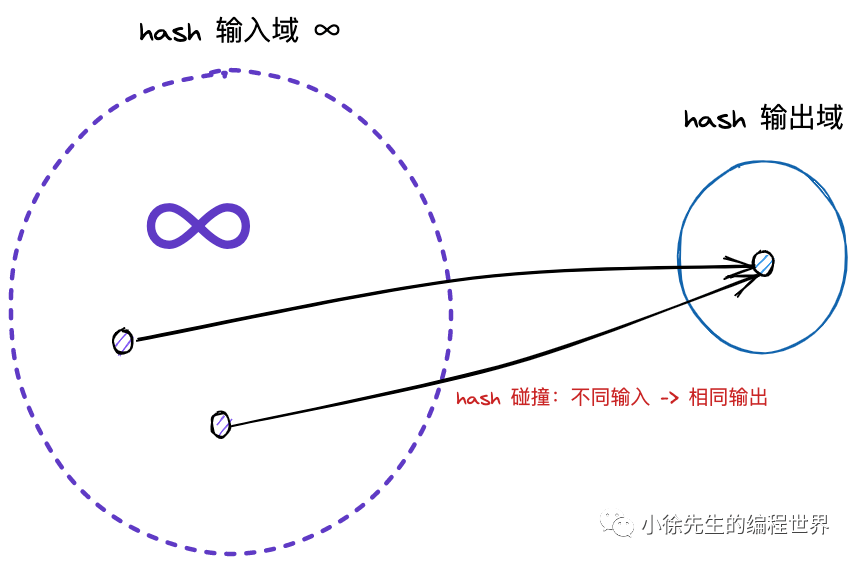
(4)hash 冲突:由于输入域(key)无穷大,输出域(hash 值)有限,因此必然存在不同 key 映射到相同 hash 值的情况,称之为 hash 冲突。
桶数组结构
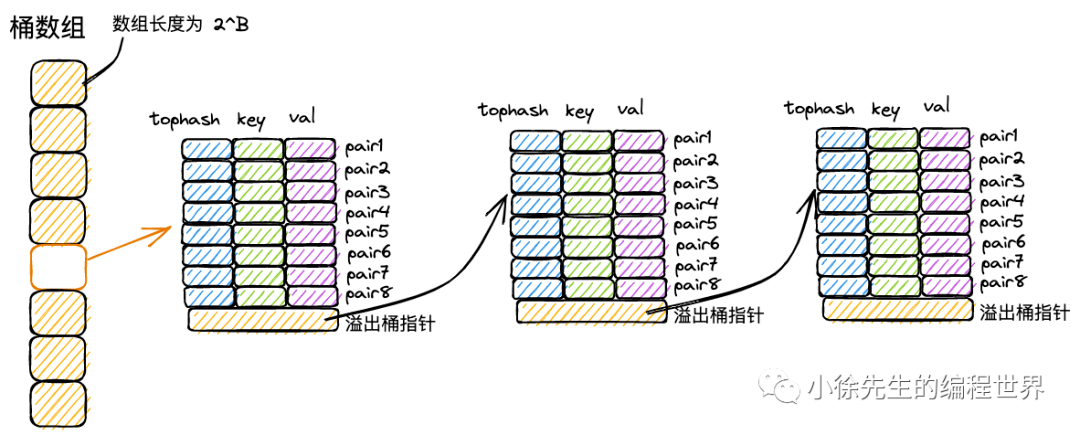
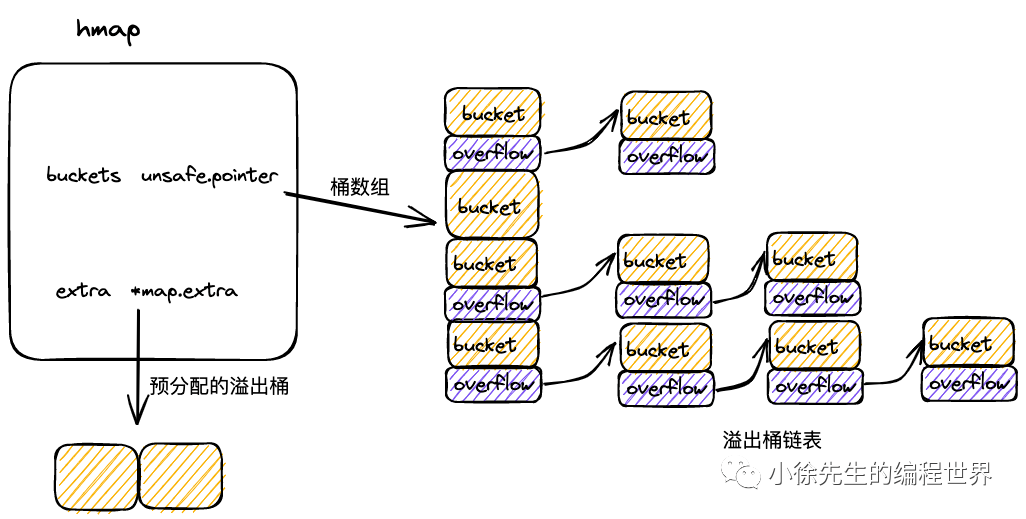
map 中,会通过长度为 2 的整数次幂的桶数组进行 key-value 对的存储:
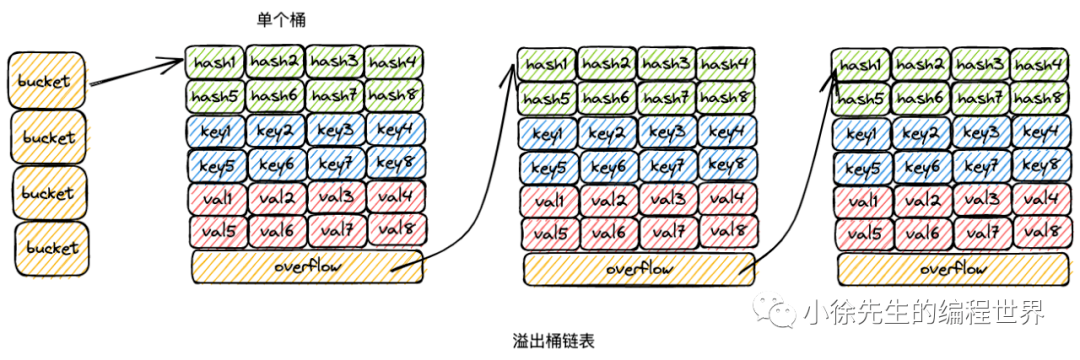
(1)每个桶固定可以存放 8 个 key-value 对;
(2)倘若超过 8 个 key-value 对打到桶数组的同一个索引当中,此时会通过创建桶链表的方式来化解这一问题。
桶数组的设计优势
- 2 的幂次长度:便于使用位运算进行取模操作,提高性能
- 固定桶容量:每个桶存储 8 个元素,在内存局部性和查找效率间取得平衡
- 溢出桶机制:通过链表解决哈希冲突,保证数据完整性
拉链法解决 Hash 冲突
首先,由于 hash 冲突的存在,不同 key 可能存在相同的 hash 值;
再者,hash 值会对桶数组长度取模,因此不同 hash 值可能被打到同一个桶中。
综上,不同的 key-value 可能被映射到 map 的同一个桶当中。
此时最经典的解决手段分为两种:拉链法和开放寻址法。
拉链法
拉链法中,将命中同一个桶的元素通过链表的形式进行链接,因此很便于动态扩展。
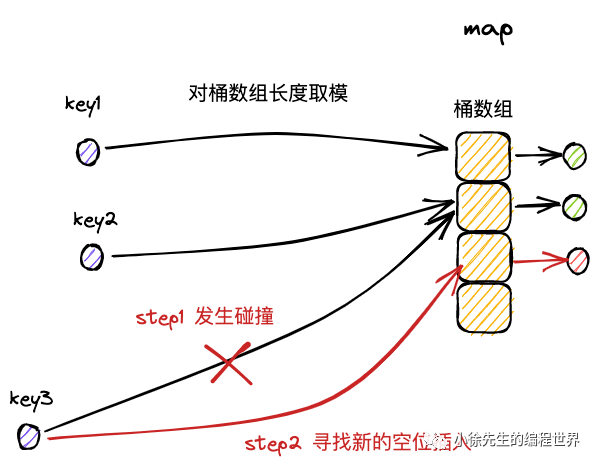
开放寻址法
开放寻址法中,在插入新条目时,会基于一定的探测策略持续寻找,直到找到一个可用于存放数据的空位为止。
两种方法的优劣对比
| 方法 | 优点 | 缺点 |
|---|---|---|
| 拉链法 | 简单常用;无需预先为元素分配内存 | 需要额外指针空间;内存不连续 |
| 开放寻址法 | 无需额外的指针用于链接元素;内存地址完全连续,可以基于局部性原理,充分利用 CPU 高速缓存 | 需要预分配内存;删除操作复杂 |
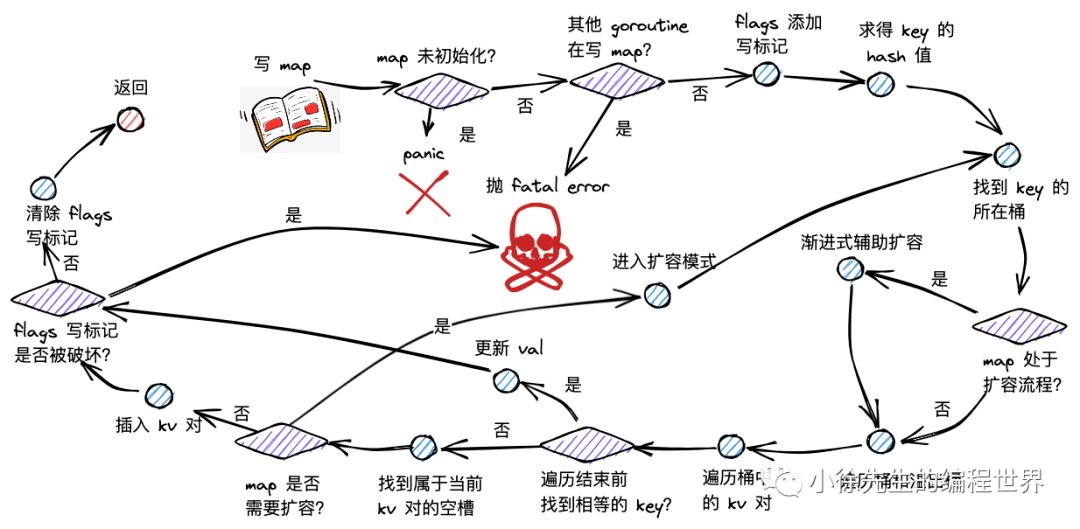
Go Map 的混合策略
在 map 解决 hash/分桶冲突问题时,实际上结合了拉链法和开放寻址法两种思路。以 map 的插入写流程为例,进行思路阐述:
(1)桶数组中的每个桶,严格意义上是一个单向桶链表,以桶为节点进行串联;
(2)每个桶固定可以存放 8 个 key-value 对;
(3)当 key 命中一个桶时,首先根据开放寻址法,在桶的 8 个位置中寻找空位进行插入;
(4)倘若桶的 8 个位置都已被占满,则基于桶的溢出桶指针,找到下一个桶,重复第(3)步;
(5)倘若遍历到链表尾部,仍未找到空位,则基于拉链法,在桶链表尾部续接新桶,并插入 key-value 对。
扩容优化性能
倘若 map 的桶数组长度固定不变,那么随着 key-value 对数量的增长,当一个桶下挂载的 key-value 达到一定的量级,此时操作的时间复杂度会趋于线性,无法满足诉求。
因此在实现上,map 桶数组的长度会随着 key-value 对数量的变化而实时调整,以保证每个桶内的 key-value 对数量始终控制在常量级别,满足各项操作为 O(1) 时间复杂度的要求。
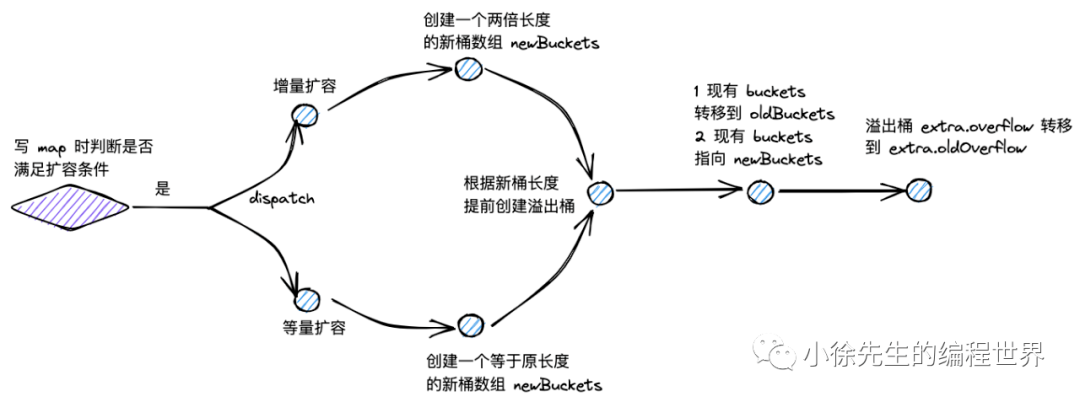
扩容机制核心点
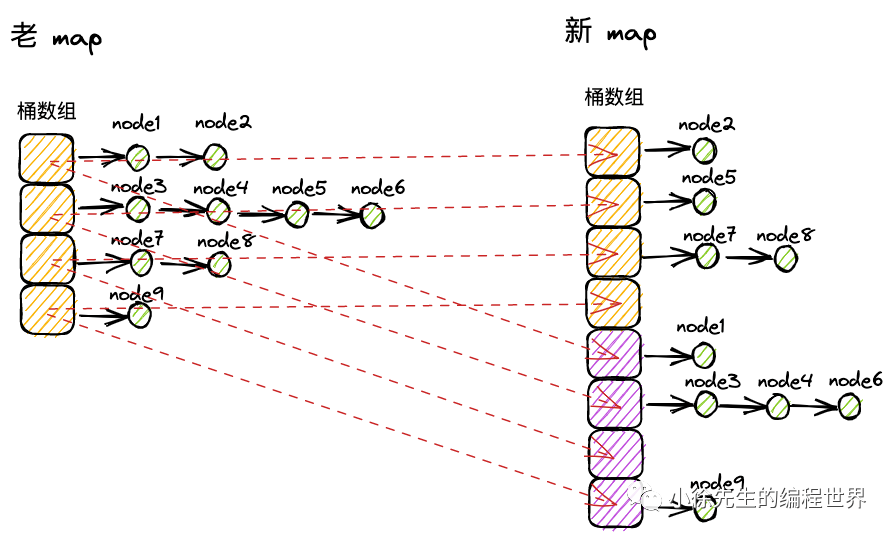
(1)扩容分为增量扩容和等量扩容;
(2)当桶内 key-value 总数/桶数组长度 > 6.5 时发生增量扩容,桶数组长度增长为原值的两倍;
(3)当桶内溢出桶数量大于等于 2^B 时(B 为桶数组长度的指数,B 最大取 15),发生等量扩容,桶的长度保持为原值;
(4)采用渐进扩容的方式,当桶被实际操作到时,由使用者负责完成数据迁移,避免因为一次性的全量数据迁移引发性能抖动。
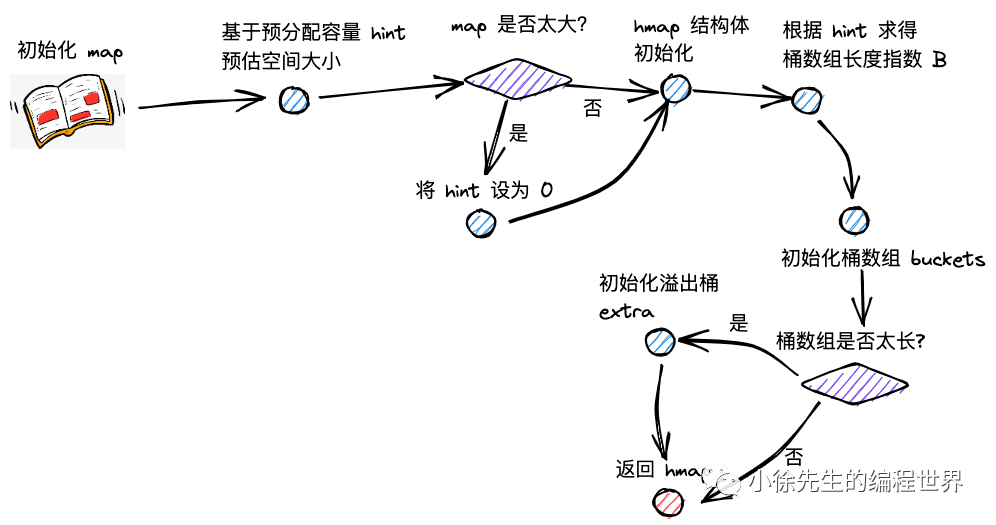
核心数据结构
hmap 结构
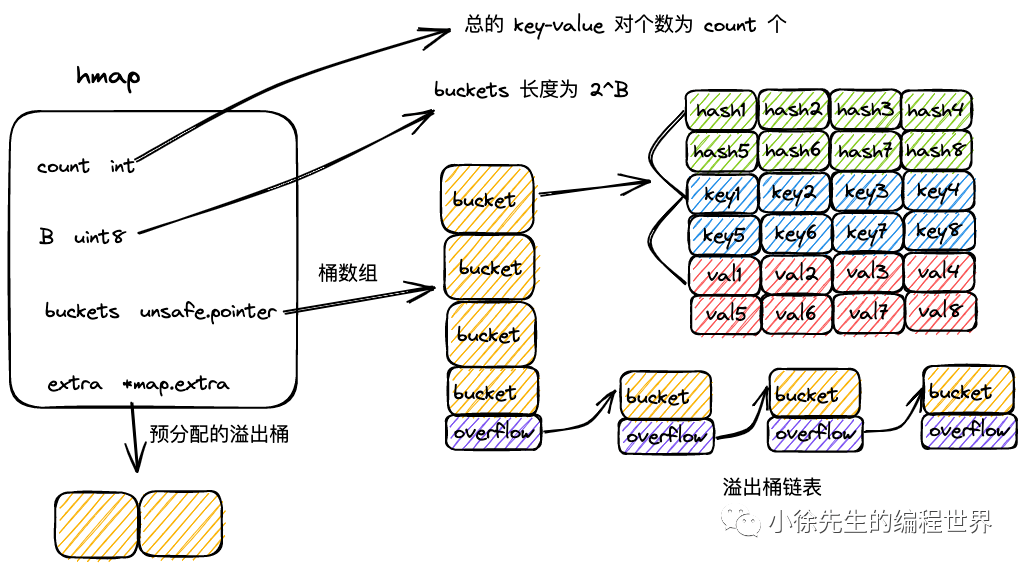
1 | type hmap struct { |
mapextra 结构
1 | type mapextra struct { |
在 map 初始化时,倘若容量过大,会提前申请好一批溢出桶,以供后续使用,这部分溢出桶存放在 hmap.mapextra 当中。
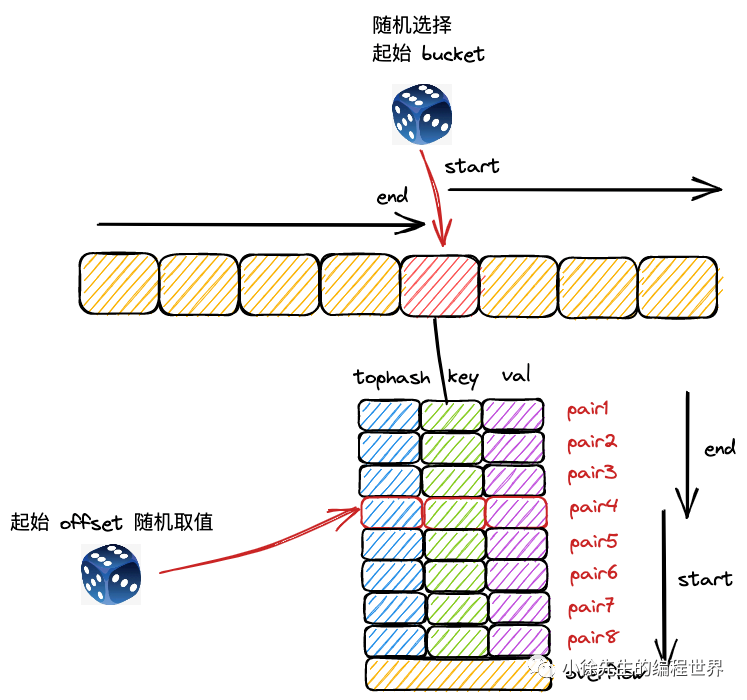
bmap 结构
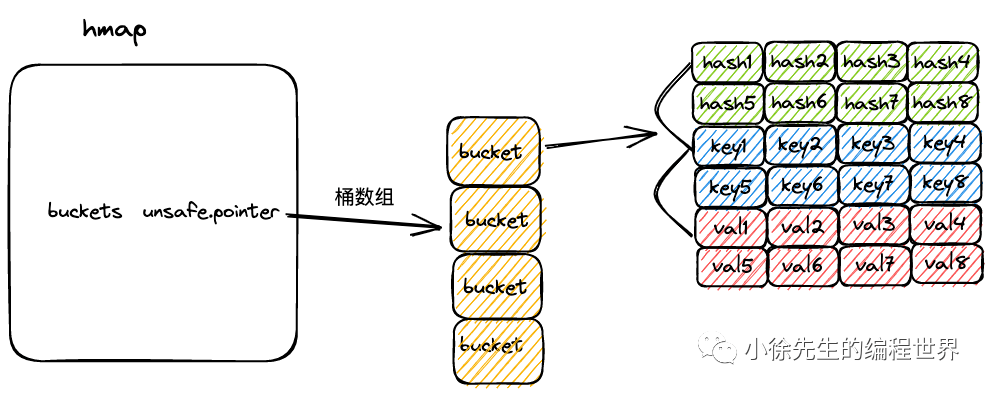
1 | const bucketCnt = 8 |
bmap 特点:
(1)bmap 就是 map 中的桶,可以存储 8 组 key-value 对的数据,以及一个指向下一个溢出桶的指针;
(2)每组 key-value 对数据包含 key 高 8 位 hash 值 tophash,key 和 val 三部分;
(3)在代码层面只展示了 tophash 部分,但由于 tophash、key 和 val 的数据长度固定,因此可以通过内存地址偏移的方式寻找到后续的 key 数组、val 数组以及溢出桶指针;
完整的 bmap 概念结构:
1 | // Conceptual representation of a bmap with explicit fields |
内存布局优化
Go Map 的内存布局经过精心设计:
- tophash 数组在前:便于快速比较,避免访问完整的 key
- key 和 value 分离存储:提高内存访问效率
- 溢出桶指针在末尾:只有在需要时才访问
这种设计充分考虑了 CPU 缓存友好性和内存访问模式,是 Go Map 高性能的重要保障。
小结
Go Map 的核心原理体现了现代哈希表设计的精髓:
- 高效的哈希算法:保证良好的散列性和低冲突率
- 优化的数据结构:hmap、bmap、mapextra 三级结构协同工作
- 混合冲突解决策略:结合开放寻址法和拉链法的优势
- 动态扩容机制:保持负载因子在合理范围内
- 内存布局优化:充分利用 CPU 缓存提高性能
理解这些核心原理对于深入掌握 Go Map 的实现细节和性能特征至关重要。