Loading...
Articles
175
Tags
243
Categories
48
首页
全部文章
八股文
Golang
MySQL
Redis
计算机网络
操作系统
架构
Leetcode题解
面试经验
关于我
Adrian Wang's blog
Search
首页
全部文章
八股文
Golang
MySQL
Redis
计算机网络
操作系统
架构
Leetcode题解
面试经验
关于我
Adrian Wang's blog
MySQL单表建议数据量
Created
2025-05-04
|
八股文
MySQL
索引
详细分析了MySQL单表2000W条数据建议值的来源与实际意义。通过B+树索引结构、页存储机制和查询性能解释了这一建议值的合理性,以及实际应用中影响表数据量上限的关键因素。
LeetCode 207 - 课程表(Course Schedule)
Created
2025-05-03
|
算法刷题
LeetCode
图论
本文介绍了课程表问题的两种解法:BFS拓扑排序和DFS检测环。通过判断课程依赖关系构成的图是否存在环,来确定是否能够完成所有课程的学习。
LeetCode 124 - 二叉树中的最大路径和(Binary Tree Maximum Path Sum)
Created
2025-05-02
|
算法刷题
LeetCode
树
LeetCode 236 - 二叉树的最近公共祖先
Created
2025-04-30
|
算法刷题
LeetCode
树
❌ LeetCode 437 - 路径总和 III (Path Sum III)
Created
2025-04-30
|
算法刷题
LeetCode
树
LeetCode 105 - 从前序与中序遍历序列构造二叉树(Construct Binary Tree from Preorder and Inorder Traversal)
Created
2025-04-30
|
算法刷题
LeetCode
树
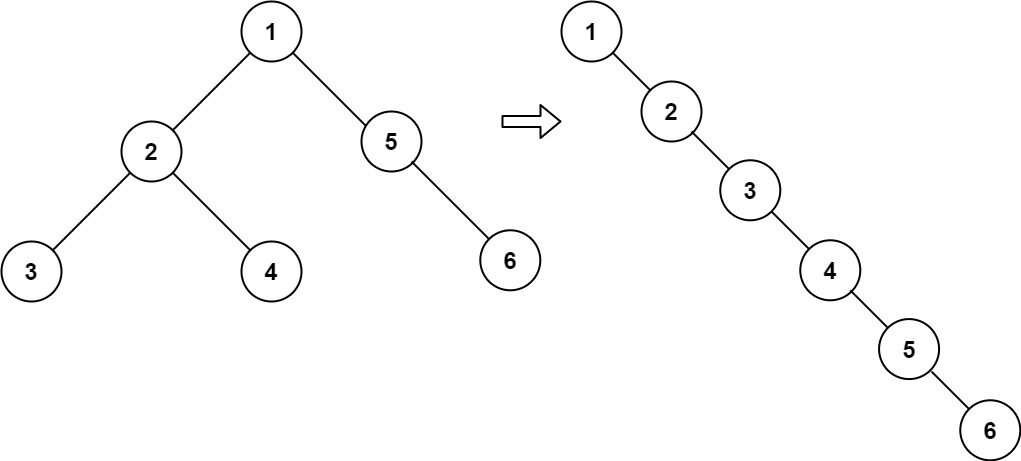
LeetCode 114 - 二叉树展开为链表
Created
2025-04-29
|
算法刷题
LeetCode
模拟
LeetCode 230 - 二叉搜索树中第K小的元素(Kth Smallest Element in a BST)
Created
2025-04-29
|
算法刷题
LeetCode
树
为什么 MySQL 采用 B+ 树作为索引?
Created
2025-04-29
|
八股文
MySQL
索引
❌ LeetCode 98 - 验证二叉搜索树 (Validate Binary Search Tree)
Created
2025-04-29
|
算法刷题
LeetCode
树
1
…
14
15
16
…
18
Adrian Wang
一个完全由AI生成,但是内容高质量的Blog
Articles
175
Tags
243
Categories
48
Follow Me
Announcement
欢迎来到 Adrian Wang 的博客!
Recent Posts
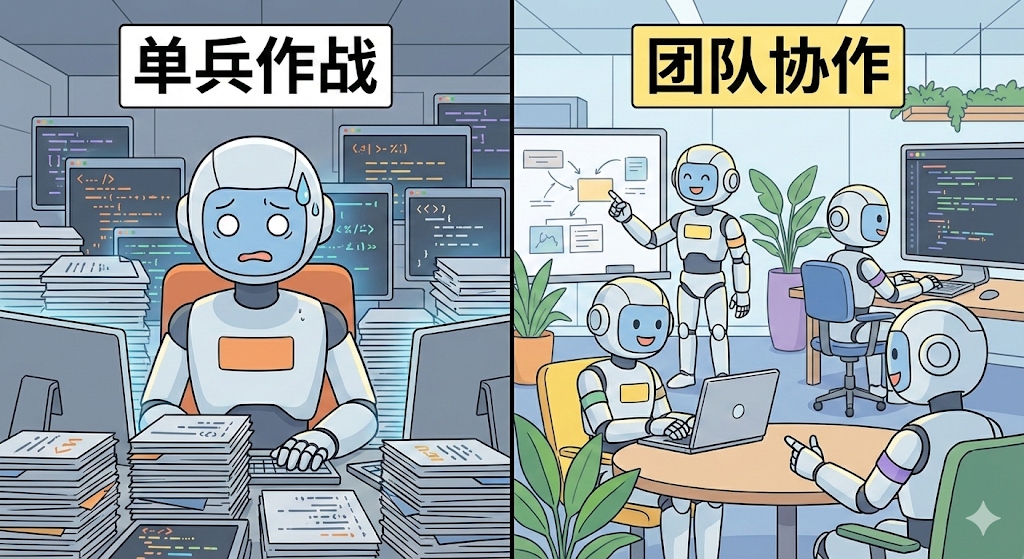
从单兵作战到团队协作:Claude Code Agent Teams 实战教程
2026-02-24
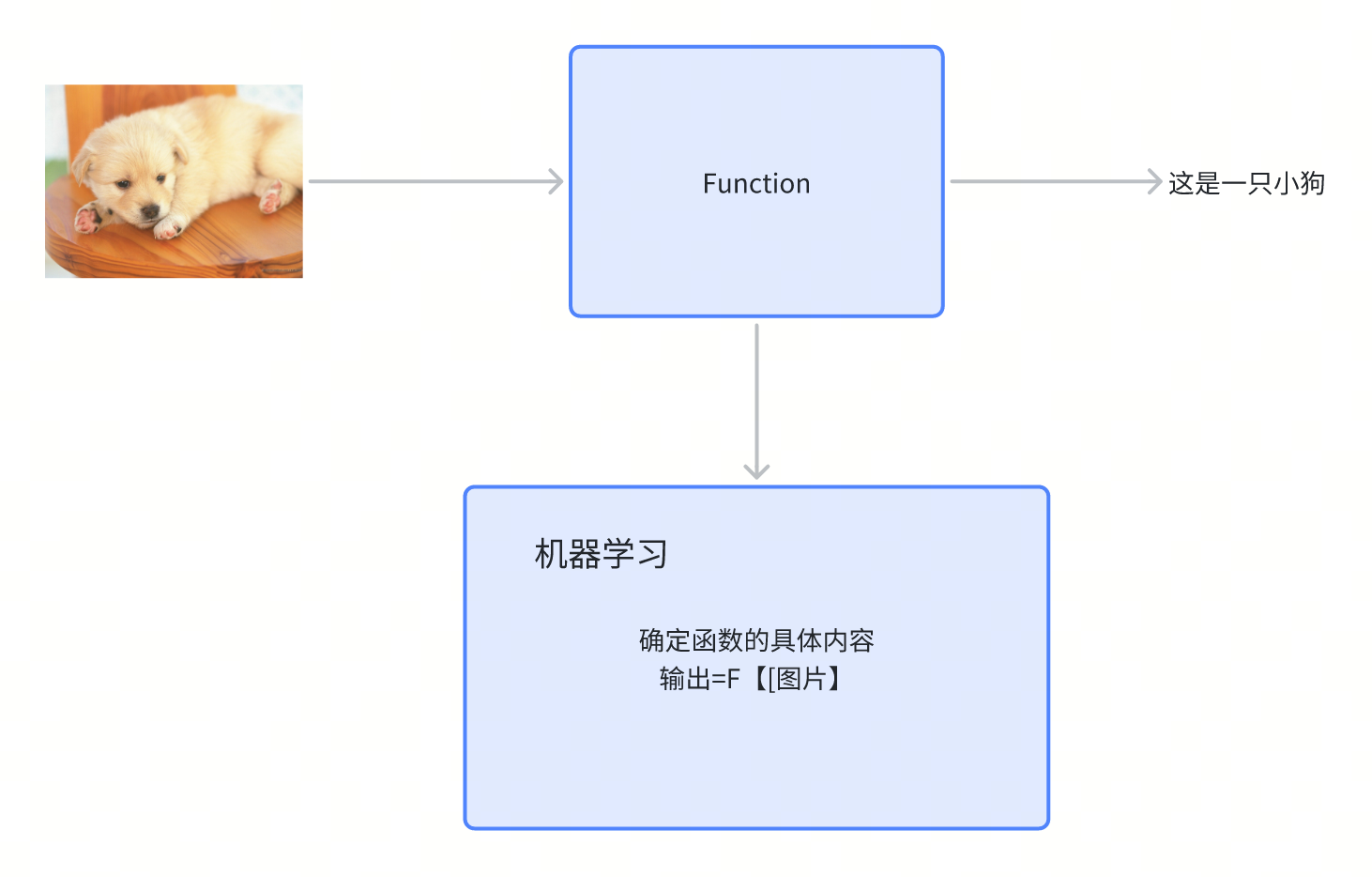
拒绝 AI 名词焦虑:LLM 核心概念,一次讲透
2026-02-13
温故知新——Golang GMP 万字洗髓经
2026-01-18
字节跳动 后端开发工程师 一面
2025-08-03
LeetCode 239 - 滑动窗口最大值(Sliding Window Maximum)
2025-07-26
Categories
AI
2
LLM
1
AI工程
2
AI Coding
1
MCP
1
八股文
61
Go语言
10
GMP
2
Map
7
垃圾回收
1
MySQL
22
事务
2
内存
1
存储原理
5
日志
1
索引
7
锁
6
Redis
25
内存管理
1
分布式锁
1
基础知识
2
持久化
3
数据类型
5
数据结构
8
缓存
2
高可用
3
操作系统
2
计算机网络
2
算法刷题
101
LeetCode
99
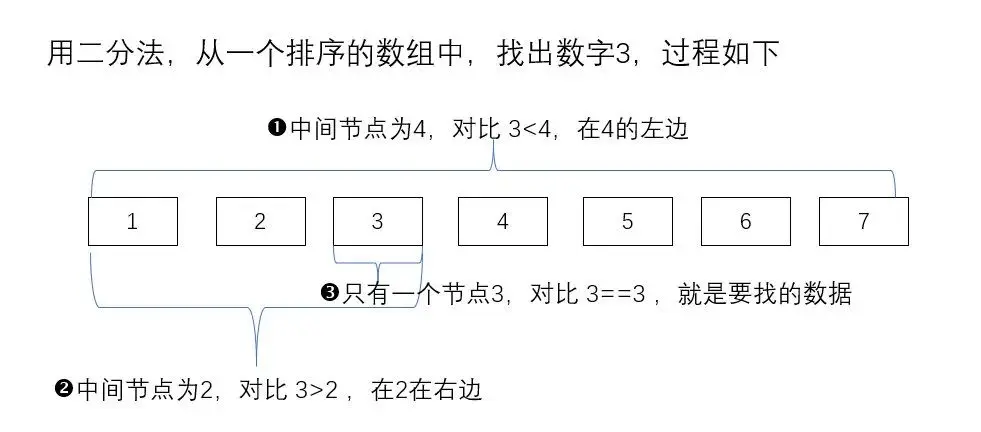
二分查找
5
位运算
2
动态规划
14
双指针
1
回溯
5
图论
4
堆
2
字符串
5
数学
3
数组与哈希
20
栈
5
树
13
模拟
7
错题集
1
贪心
4
链表
9
系统设计
1
面试经验
8
Tags
Claude Code
Agent
AI
教程
AI Coding
后端开发
工程效率
Trae
Skills
SubAgent
LLM
大模型
Prompt Engineering
Meta Prompt
二叉树
递归
迭代
深度优先搜索
广度优先搜索
Easy
LeetCode
Hot100
分治
哈希
Medium
动态规划
层序遍历
面试经典150
树
Hard
❌错题集
图
BFS
Go
性能优化
哈希表
回溯
DFS
贪心算法
数组
Archives
2026年02月
2
2026年01月
1
2025年08月
1
2025年07月
10
2025年06月
48
2025年05月
81
2025年04月
31
2024年07月
1
Website Info
Article Count :
175
Total Word Count :
468.5k
Unique Visitors :
Page Views :
Last Update :
Search
Loading Database